








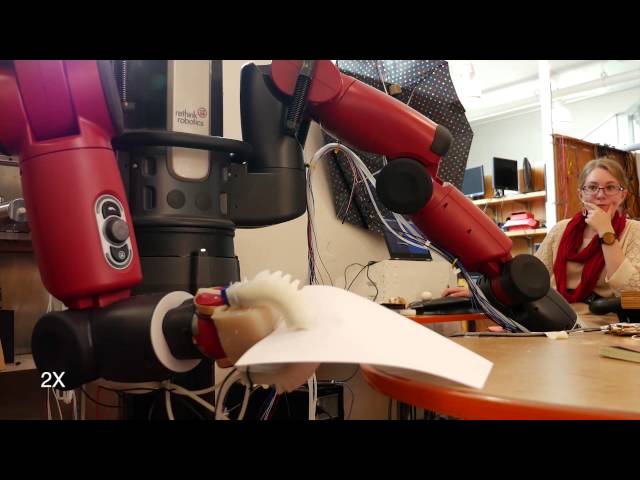
Дослідники з Лабораторії обчислювальної техніки і штучного інтелекту Массачусетського технологічного інституту створили спеціальний маніпулятор для роботів. Він створений з силікону і дозволяє визначати форму об'єктів на дотик.
Маніпулятор оснащений силіконовими актуаторами, які дозволяють захоплювати предмети різної форми і міцності, не пошкоджуючи їх при цьому. Вбудовані в маніпулятор датчики дозволяють визначати твердість і кривизну поверхні захопленого об'єкта. Керуючий алгоритм зіставляє дані про взаємне розташування робопальцев і показання датчиків з базою даних і з'ясовує, до якого з відомих об'єктів найбільше підходять виявлені параметри. Зрозумівши, що за об'єкт перед ним, робот піднімає його з необхідною для захоплення силою.
Не дивлячись на те, що при створенні системи використовувалося всього три робопальца, з її допомогою можна відрізнити навіть схожі за формою предмети. Наприклад, робот може розрізнити пластикову пляшку і паперовий стакан. Використання гнучкого маніпулятора дозволяє захоплювати незвичні для жорстких маніпуляторів об'єкти, наприклад, диски або аркуші паперу.
Раніше повідомлялося про те, що інженер з Австралії розробив робота-будівельника, здатного збудувати житловий будинок за рекордно короткий час. Перед початком процесу будівництва робот Hadrian на підставі інформації 3D CAD визначає майбутнє місце розташування кожної з цеглин. Потім робот самостійно нарізає цеглу та укладає її у відповідності з заданою послідовністю, залишаючи простір для труб і електропроводки.







 Увійти за допомогою Google
Увійти за допомогою Google