








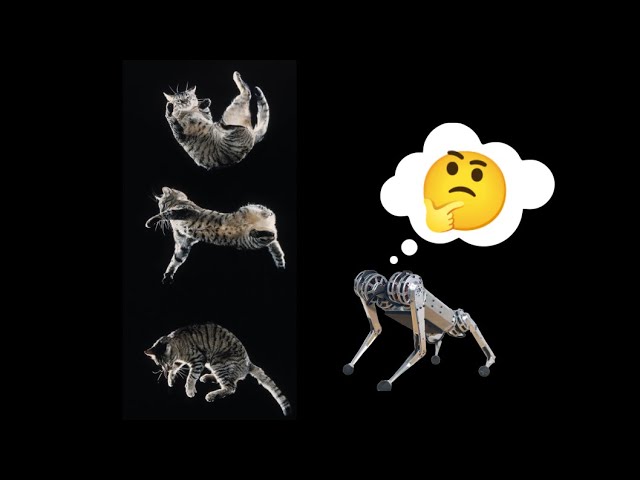
Американські вчені навчили чотириногого робота Mini Cheetah приземлятися на ноги при падінні під будь-яким кутом. На початку падіння нейромережа за дві мілісекунди розраховує траєкторію руху, яка необхідна для горизонтального приземлення, повідомляє N+1.
Кішки ще в перші тижні життя починають проявляти рефлекс випрямлення при падінні, завдяки якому приземляються на лапи навіть в тому випадку, якщо спочатку падали спиною вниз. В кінці 1960-х років вчені прийшли до висновку, що тварини поєднують два типи обертальних рухів, згинаючи спину в польоті.
Інженери з американського Університету Нотр-Дам розробили метод перевороту в падінні, який підходить для більшості чотириногих роботів. Роботу алгоритму перевірили на роботі Mini Cheetah - його створили розробники з Массачусетського технологічного інституту для розробки і налагодження нових алгоритмів.
Створена вченими нейромережа бере початковий стан робота і створює на його основі траєкторію падіння аж до самої підлоги. Траєкторія складається з набору станів і крутящих моментів електромоторів ніг, необхідних, щоб прийти в наступні стан.
Підписуйтесь на наш Telegram-канал з новинами технологій і культури.

Раніше американські компанії Ghost Robotics і SWORD Defense представили бойового робота, створеного на базі апарату Vision-60. Його оснастили гвинтівкою з дальністю прицільної стрільби 1,2 кілометра і тепловізором.







 Увійти за допомогою Google
Увійти за допомогою Google