








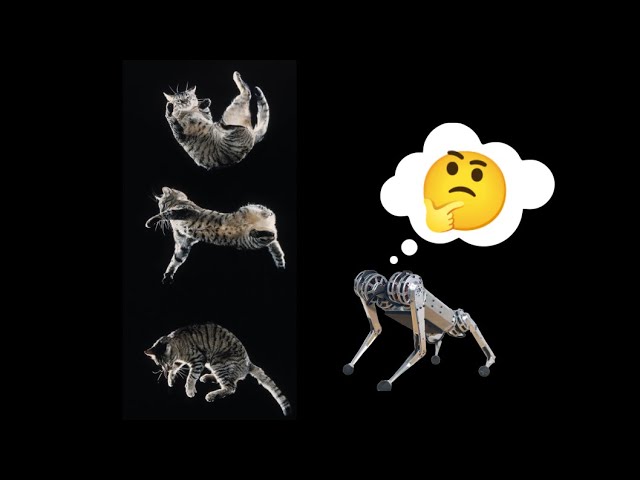
Американские ученые научили четвероногого робота Mini Cheetah приземляться на ноги при падении под любым углом. В начале падения нейросеть за две миллисекунды рассчитывает траекторию движения, которая необходима для горизонтального приземления, сообщает N+1.
Кошки еще в первые недели жизни начинают проявлять рефлекс выпрямления при падении, благодаря которому приземляются на лапы даже в том случае, если изначально падали спиной вниз. В конце 1960-х годов ученые пришли к выводу, что животные совмещают два типа вращательных движений, изгибая спину в полете.
Инженеры из американского Университета Нотр-Дам разработали метод переворота в падении, который подходит для большинства четвероногих роботов. Работу алгоритма проверили на роботе Mini Cheetah – его создали разработчики из Массачусетского технологического института для разработки и отладки новых алгоритмов.
Созданная учеными нейросеть берет изначальное состояние робота и создает на его основе траекторию падения вплоть до самого пола. Траектория состоит из набора состояний и крутящих моментов электромоторов ног, необходимых, чтобы прийти в следующие состояния.
Подписывайтесь на наш Telegram-канал с новостями технологий и культуры.

Ранее американские компании Ghost Robotics и S.W.O.R.D. Defense представили боевого робота, созданного на базе аппарата Vision-60. Его оснастили винтовкой с дальностью прицельной стрельбы 1,2 километра и тепловизором.







 Войти с помощью Google
Войти с помощью Google