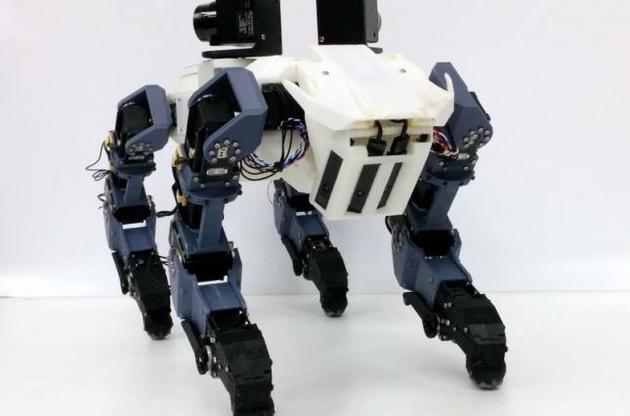
Вчені з Токійського столичного університету розробили чотириногого робота, який оснащений спеціальними захватами, що дозволяють йому підійматися по вертикальній драбині. Робота представили на конференції IROS 2019, повідомляє "Популярная механика".
Наголошується, що пристрій оснащений чотирма ногами з п'ятьма ступенями свобод. Вони обладнані на кінцях датчиками сили і дотику, а також засувками, які дають роботу можливість захопити поручень при підйомі на сходи.
Система навігації робота використовує два лазерних дальнометра, які розташовуються на спині, а також чотири камери на голові. Інформація з різних датчиків об'єднується в хмару точок, аналізом якої займаються спеціальні алгоритми (зазначається, що на даний момент алгоритми навчають окремо для кожної драбини, проте в подальшому розробники планують зробити їх універсальними).
Підписуйтесь на наш Telegram-канал з новинами технологій та культури.
Раніше розробники компанії навчили двоногого робота Atlas паркуру. Робот навчився перестрибувати через колоду і підійматися на високі сходи. У компанії стверджують, що Atlas застрибує на сходи висотою 40 сантиметрів без втрати темпу.