Вчені з університетів Ольстера і Цюріха навчили роботів, подібно хижакам, полювати на здобич. На думку дослідників, це допоможе роботам у майбутньому оцінювати навколишнє середовище і знаходити ціль в режимі реального часу. Результати досліджень вчених були опубліковані на сайті ArXiv.
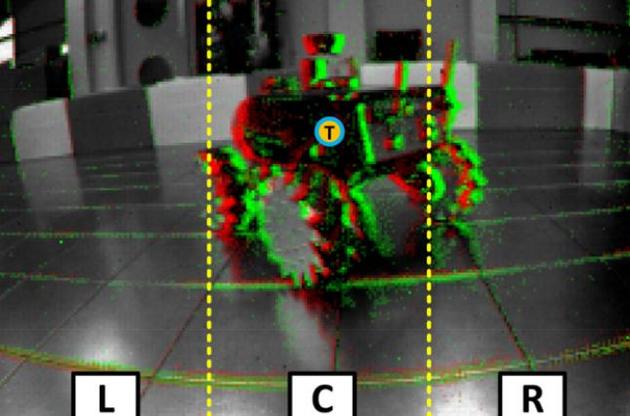
Дослідники встановили на чотириколісного робота Robotnik Summit XL неймовірно точну нейромережу. На робота була також встановлена камера DAVIS, яка імітує сприйняття інформації людським оком. Для навчання нейромережі вчені використовували зображення звичайної камери і камери DAVIS, на яких вони вручну проставили позначки, що вказують на місце іншого робота. Всього таких зображень було понад 500 тисяч.
Після того, як робот визначав місце розташування здобичі, він починав полювання. Він рухався у напрямку до здобичі до тих пір, поки вбудований сканер не визначав можливість зіткнення. Тоді здобич вважалася "спійманою".
Раніше вчені навчили робота сумніватися в правильності вказівок людини. Отримавши наказ, робот не відразу його виконує, а спочатку аналізує свої навички і фізичні можливості виконати наказ. Крім цього розглядається становище робота в системі відносин "начальник-підлеглий": робот "думає", чи має він взагалі виконувати цей наказ. Щоб це сталося, людина, що віддає розпорядження повинна володіти відповідними повноваженнями.