Ученые из Инновационного кампуса Небраски, который действует при Университете Небраски-Линкольна, разработали миниатюрного робота-хирурга, который может работать в условиях космоса. Он получил название Miniaturized In-vivo Robotic Assistant, сокращенно MIRA, сообщает Science Alert.
В 2024 году портативная платформа для роботизированной хирургии будет доставлена на Международную космическую станцию. Это будет испытательная миссия, которая продемонстрирует возможность функционирования такой системы в космосе.
Над созданием робота работали Шейн Ферритор и его команда. Исследователь уже сотрудничал с Космическим центром Кеннеди NASA, Центром космических полетов имени Годдарда и Лабораторией реактивного движения в поддержку программы NASA Mars Exploration Rover (MER).
В частности, он помогал в проектировании и сборе марсоходов Curiosity и Perseverance, определении плана их движения, а также разработке процесса, при котором солнечные детекторы марсохода используются для определения направления его движения.
Ферритор и его коллега Дмитрий Олейников на протяжении 20 лет занимались разработкой MIRA, им удалось привлечь более 100 миллионов долларов венчурного капитала. Недавно NASA предоставило их компании Virtual Incision грант в размере 100 тысяч долларов.
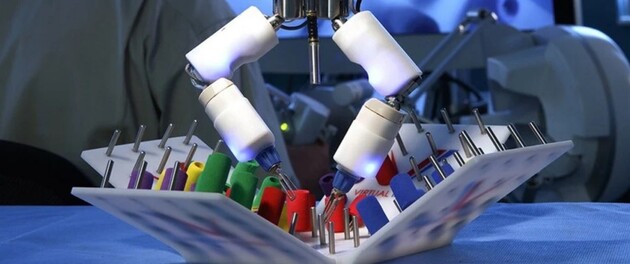
По сравнению с другими роботизированными комплексами у MIRA есть несколько преимуществ. Во-первых, его инструменты можно вводить через небольшие разрезы, что позволяет врачам проводить минимально инвазивные операции. Во-вторых, использование робота позволяет хирургам работать удаленно. На Земле эта технология уже позволяет медикам помогать пациентам в отдаленных местах, где медицина недоступна.
Более того, у MIRA есть преимущество, заключающееся в автономной работе. Это значит, что астронавты, которые будут колонизировать Луну или Марс, смогут получить медицинскую помощь без присутствия человека-хирурга.
В августе 2021 года робот успешно прошел испытания во время проведения удаленной операции на Земле. На протяжении следующего года Ферритор и его коллеги будут работать над технологиями робота, чтобы адаптировать его к проведению операций на борту МКС.